注意!该教程对应ROS套件用户
在本章节中,我们将演示使用手机APP控制、建图、导航。
手机APP SLAM建图
首先安装建图APP,软件在下载资料包 /软件工具/MAP-Mapping.apk里
建图可使用不同算法,这里介绍gmapping为例子,使用方法和建图章节相同,只不过rviz切换为手机显示和控制
- 启动基础驱动
roslaunch lingao_bringup robot.launch - 启动建图节点
roslaunch lingao_slam slam.launch - 打开手机软件
Make A Map,将Url为小车Master的Url,点击connect连接机器人
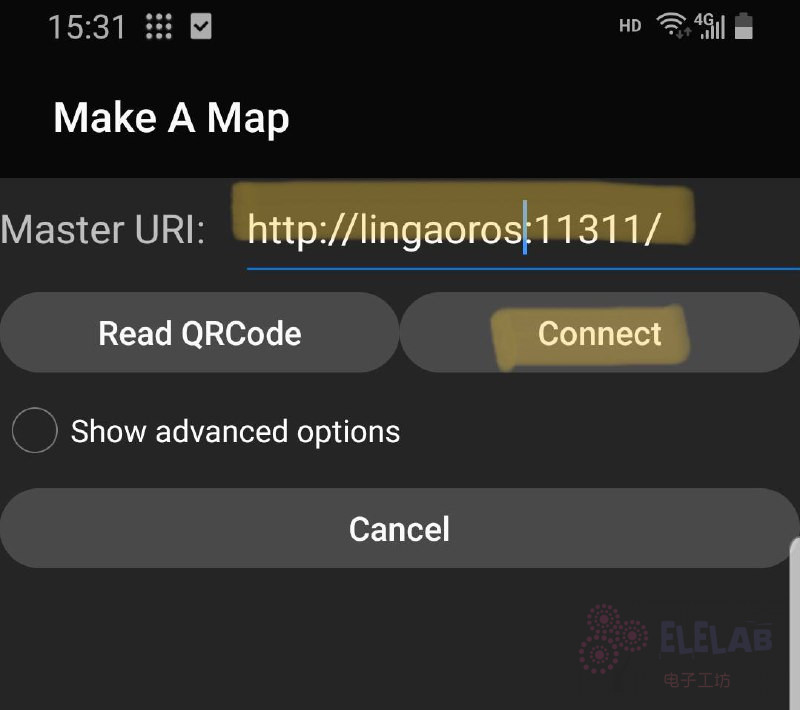
-
点击右上边地图切换显示,通过手机APP摇杆或者遥控控制小车行走建图



手机APP Nav导航
首先安装建图APP,软件在下载资料包 /软件工具/MAP-Navigate.apk里
导航和前面章节的导航相同,只不过rviz切换为手机显示和控制
- 启动基础驱动
roslaunch lingao_bringup robot.launch - 启动nav导航包
roslaunch lingao_navigation navigate.launch - 打开手机软件
MAP Nav,将Url为小车Master的Url,点击connect连接机器人(和上一章相同) -
发送初始姿态给amcl
上方选择Set Pose,在你的位置长按拉方向(不好放的话建议使用rviz)
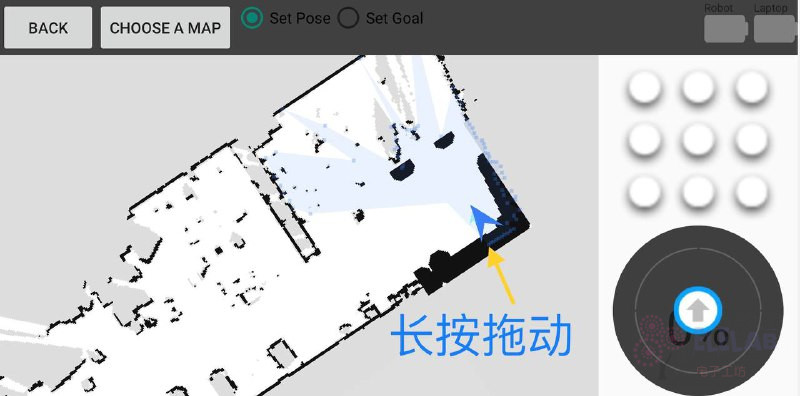
-
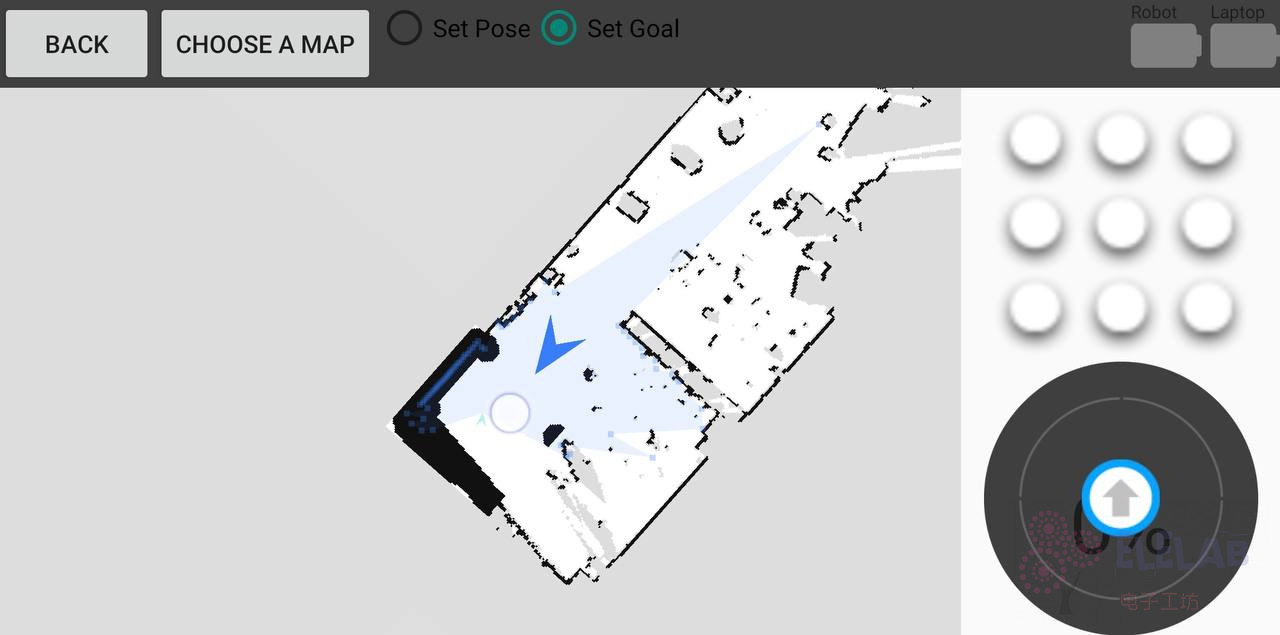
发送位置导航
上方选择Set Goal,长按你想去的位置选择方向,松开即走


这款软件开源地址:https://github.com/rosjava/android_apps
其他APP应用
-
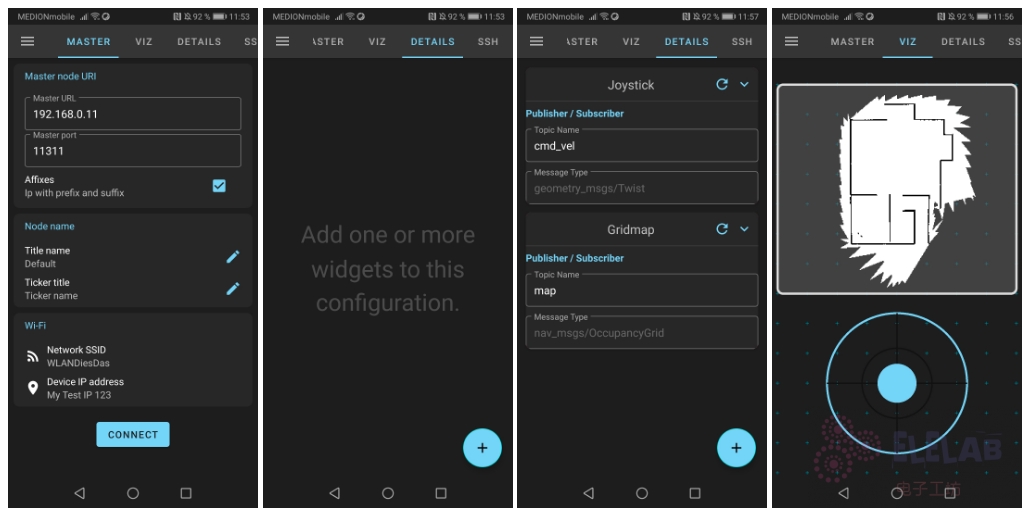
ROS-Mobile-Android
这款软件比较新,对 ( ROS )运行的移动机器人系统进行动态控制和可视化。软件调试功能比较多,可查看日志、地图、摄像头、控制按钮、SSH远程控制。
软件的安装文件在软件工具/ROS-Mobile.apk
开源地址:https://github.com/ROS-Mobile/ROS-Mobile-Android
-
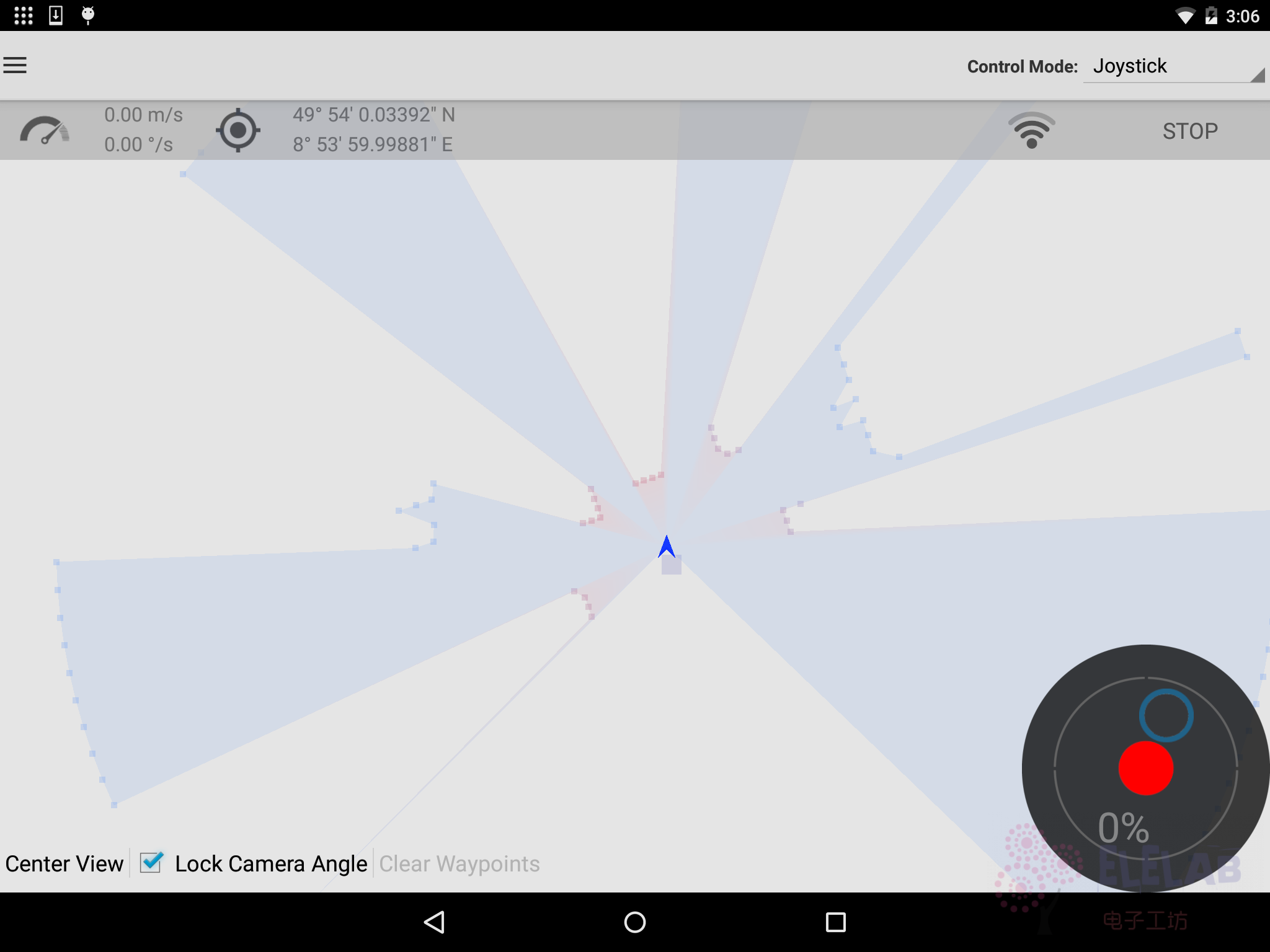
RobotCA
软件的安装文件在软件工具/ROSControl.apk
该应用程序可查看激光扫描环境、遥控控制、重力控制
开源地址:https://github.com/ros-autom/RobotCA