ROS应用 2 | 基于激光雷达的跟随
注意!该教程对应ROS套件用户
在本章节中,我们将演示激光雷达的跟随。
雷达的跟随是ROS 的一个非常简单的demo,使用激光测距仪追踪最近的物体。
启动节点
- 在主控端启动灵遨基础驱动
roslaunch lingao_bringup robot.launch - 在主控端启动雷达跟随
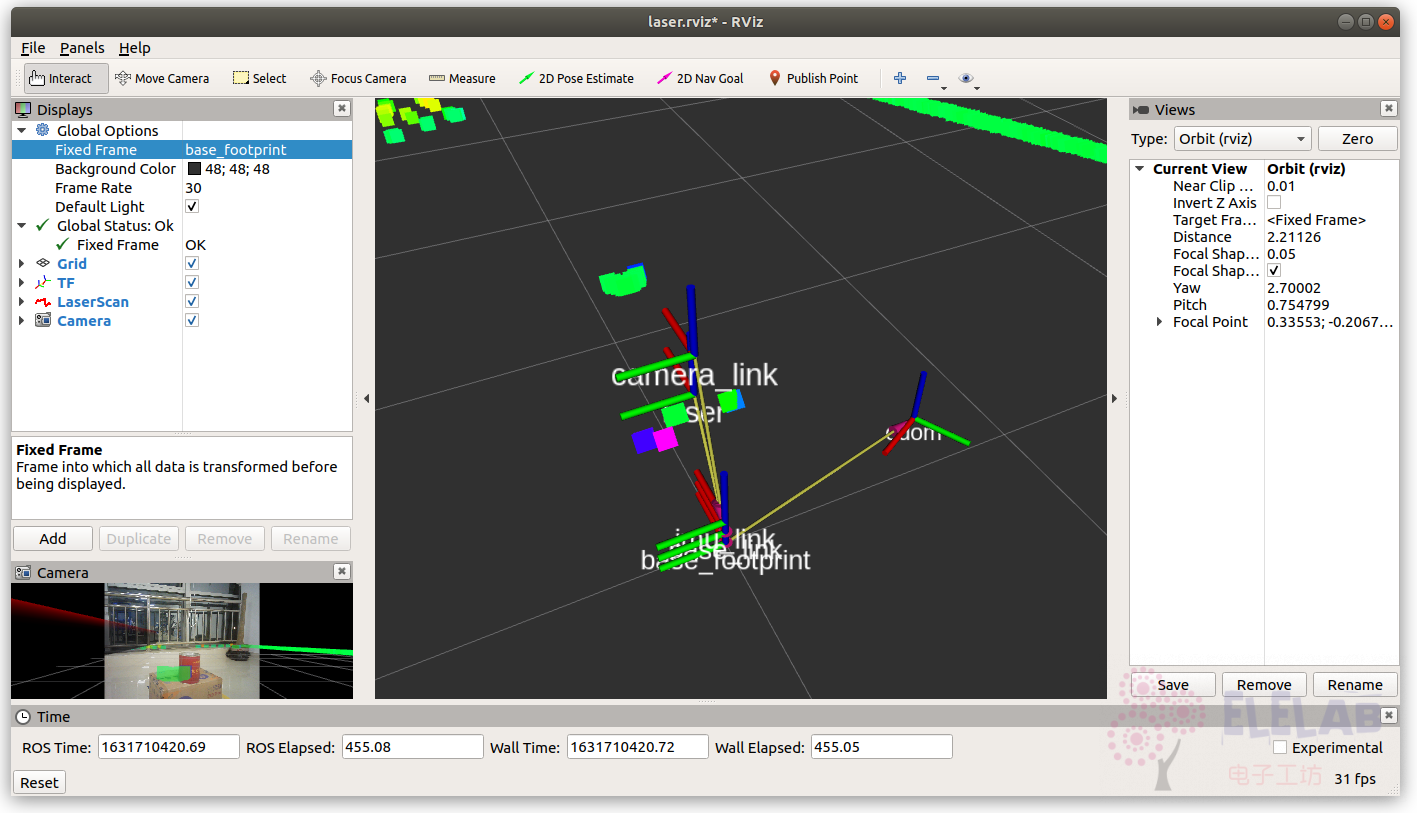
roslaunch lingao_laser_follower laser_follower.launch
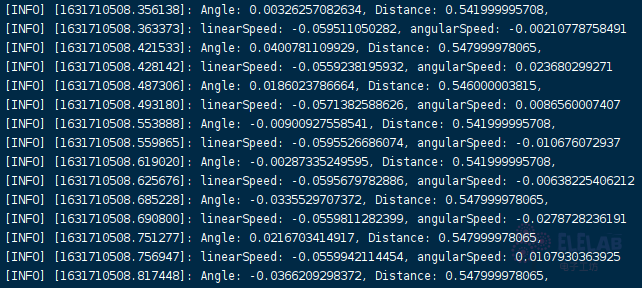
节点启动后开始跟随雷达面前135度最近的物体
注意!该教程对应ROS套件用户
在本章节中,我们将演示激光雷达的跟随。
雷达的跟随是ROS 的一个非常简单的demo,使用激光测距仪追踪最近的物体。
roslaunch lingao_bringup robot.launch
roslaunch lingao_laser_follower laser_follower.launch
节点启动后开始跟随雷达面前135度最近的物体

