ROS基础 2 | 安装 ROS Melodic – 基于Ubuntu 18
安装 ROS Melodic 基于Ubuntu 18
ROS Melodic Morenia于2018年5月发布,支持至2023年5月,推荐用于Ubuntu 18.04,官方对 ROS 兼容性最好的是 Ubuntu,可以直接使用 apt-get 快捷安装各版本的 ROS
该教程使用树莓派4B 基于上个系统安装教程安装的Ubuntu 18 桌面版(必须使用大于8G内存卡)
设置ROS源
使用中科大ROS源设置:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
设置key:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
如果连接密钥服务器遇到网络不稳定可将 “hkp://keyserver.ubuntu.com:80″更换为”hkp://pgp.mit.edu:80” 或者 “hkp://keyserver.ubuntu.com:80”
更新软件包:
sudo apt update

安装ROS
ROS中有许多不同的库和工具。我们提供了四种默认配置来帮助您入门。您也可以单独安装ROS软件包。
桌面全功能版本安装: (默认推荐) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception包:
sudo apt install ros-melodic-desktop-full
桌面版本安装:ROS, rqt, rviz, and robot-generic libraries
sudo apt install ros-melodic-desktop
单独ROS包:
sudo apt install ros-melodic-ros-base
设置环境变量
每次启动新的shell时,将ROS环境变量自动添加到bash会话中方便你执行程序
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你只想改变一次环境只需要执行以下命令:
source /opt/ros/melodic/setup.bash
构建软件包的依赖关系
到目前为止,已完成安装运行核心ROS软件包所需的软件。为了创建和管理您自己的ROS工作区,有各种工具和要求分别分发。例如,rosinstall是一个常用的命令行工具,使您可以通过一个命令轻松下载ROS软件包的许多源代码树。
要安装此工具和其他依赖项以构建ROS软件包,请运行:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
初始化rosdep
在运行一堆ROS工具之前,您需要初始化rosdep。rosdep使您能够轻松地为要编译的源安装系统依赖性,并且是运行ROS中某些核心组件所必需的。如果尚未安装rosdep,请执行以下操作:
sudo apt install python-rosdep
使用以下命令,可以初始化rosdep
sudo rosdep init
rosdep update
到这里ROS安装已经结束了,下面运行一个鼠标控制海龟移动的demo来验证ROS是否成功安装好了,需要连接屏幕鼠标测试,不远程连接。
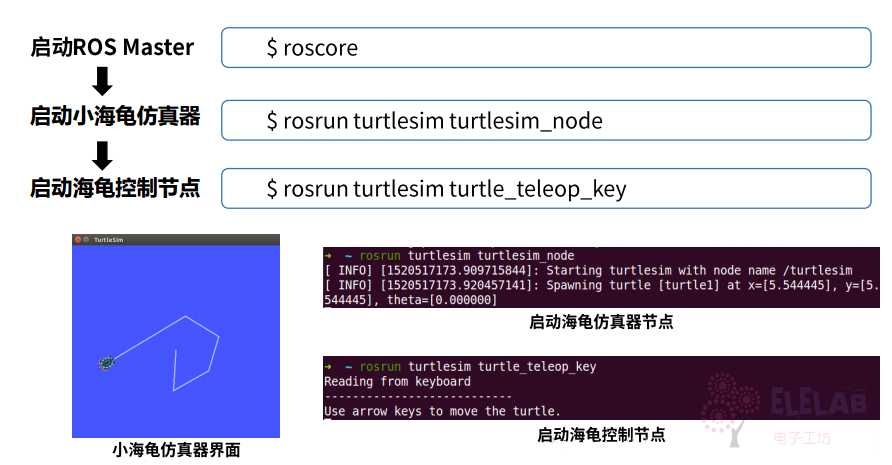
ROS测试
- 测试roscore是否能正常启动
roscore
- 打开一个显示小海龟的窗口,新开启一个终端,执行以下命令:
rosrun turtlesim turtlesim_node
- 开启键盘对海龟的控制,再开启一个终端,执行以下命令:
rosrun turtlesim turtle_teleop_key
使用方向键,可以看到小海龟运动,这时可以确定ROS安装成功,如下图